1X Technologies研發的家用人形機器人「Neo」近期開放預購,為已經十分火熱的機器人議題增添薪火。外表看似傳統機器手臂,內裡蘊藏獨門力控技術的機器人獨角獸「非夕」,6月也完成億元美元規模的C輪融資。為何「力量控制」對新一代機器人至關重要?
無論是新一代的機器手臂「拂曉」(Rizon),或是採納並聯式架構的「玄暉」(Moonlight),非夕科技的兩大明星產品在外觀上都與過往工廠裡常見的自動化機器十分相似。
但若以為它們只是「上一代」的機器設備,就小看了這批「自適應」機器人內藏的技術實力。想推進各種形態的機器百花齊放、拓展多元應用的「實體AI」願景,非夕也是重要夥伴之一。
關鍵就在非夕成立近十年來,持續深耕的力量感測與力量控制技術。
「對我來說,Physical AI現在缺少的是力相關的訊息。」非夕首席機器人科學家鍾書耘向《遠見》解釋,「非夕可以提供一個好的機器人平台,去獲得真實環境的力相關訊息。」
過往的自動化機器,大多依照預先設定的位置、軌跡行動,以執行各種工業任務。近年電腦視覺優化,更多機器手臂整合了視覺能力,擴大應用範圍。但人類在操控物件時,並不是只靠視覺來完成任務。
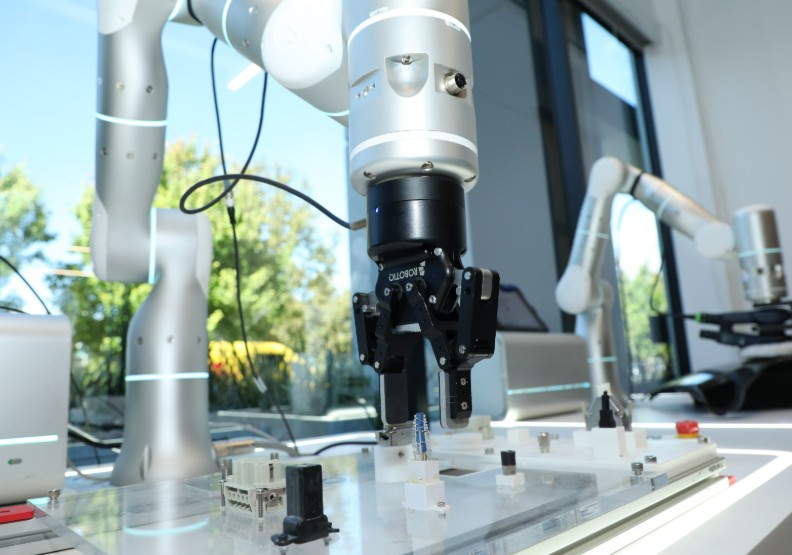
例如,想將插頭插入插座時,一般人不會僅靠視覺辨識出準確位置與角度,然後完全平行地推入插頭。而是大概看見插座在哪裡以後,拿著插頭接觸插座,來回移動找到洞所在的位置後,再一路感測適合的角度將插頭插入插孔。
因此,強調仿人化能力的非夕相信,結合視覺引導、以及力反饋產生的「手感」,才能讓機器以更像是人類的方式完成更複雜的任務。如此打造而成的機器人,可以憑藉力感測與力控制能力,適應環境變化,動態地調整行動軌跡。「自適應」機器人因應而生。
有了這樣的力反饋適應能力,機器手臂甚至可以打磨吉他琴身這樣的物體。由於木質特性與曲度變化大,木吉他的最終打磨大多只能倚賴資深工匠手工完成。但有了足夠精準的力控及感測技術,就能依循吉他琴身曲度與木質表面的變化,施加適合的打磨力度。
出身台灣的鍾書耘自豪地表示,「世界上99%的機器人都是位置控制型的機器人,大約只有1%可以做力量控制。」
鍾書耘相信,非夕是其中唯一可以把力量控制推到工業等級的團隊,力控精準度可到0.1牛頓(約10公克的重量變化)。再加上機器的恆定能力勝過人類,特別適合講求高度精準的打磨、拋光等任務,「這也是為什麼我們一直想盡辦法把力控推到極限。」
從獨門力感測技術出發,開啟具適應力的機器應用場景
非夕科技在2016年由四個史丹佛大學的同學共同成立,核心及最初的技術突破,就在力覺感測器以及力量控制演算法。
鍾書耘解釋,力感測器的本質是彈簧。透過量測形變量,推算出力量的大小。要測出高精度的力度,需要更敏感、柔軟的彈簧,但這樣的彈簧在機器移動時可能會晃動,降低機器剛性與定位準度。較堅硬的彈簧可以保持機器的剛性,但受壓時的形變量有限,難以精準測出輕微力度。
研發出能兼顧機器剛性與力量測精度的感測技術,成了非夕創立的契機。也是非夕在在市場上最大的區隔點。
再結合擁有七個自由度的機器手臂,讓非夕的機器人可以善用力控優勢,選擇最適於施力的構型,並避開「奇點(singularity)」問題。
在機器人學中,奇點指的是當手臂處於某個特定構型時,會失去一個或多個自由度的情況。也就是控制機器的模型在這些奇點上失效了,這可能會導致機器鎖定、震動或不規則運動,無法再朝某些方向移動。
一般來說,可以透過規劃行動路徑、硬體設計與控制技術等方式應對奇點問題,非夕則是為傳統常見的六軸機器手臂增加一軸,讓抵達最終姿態的方式有多種解,以避開奇點,並能為不同施力任務選擇最適配的構型。
目前,非夕約九成營收來自機器人應用較成熟、標準及法規最完善的的工業場景,在裝配、打磨、熨燙等任務都有實例。也已在科學研究、醫療與食品業等領域落地,如切割雞肉、壓製魚排等,也有客戶在非夕的機器平台上研發出可適應患者肌肉緊繃程度,進行穴道按摩的機器手臂。
AI革新機器人學,非夕、穹徹同步推進兩大基礎技術
人工智慧與機器人學相互合作,為AI機器人帶來了新的可能。例如,出現了「視覺─語言─行動模型」(VLA)這樣試圖邁向端到端控制的革命性新模型,可理解為以單一系統處理輸入端至輸出端的控制。(延伸閱讀:Google通用智慧揭密!人形機器人裝上通用大腦,不僅會擦桌子還能灌籃)
已研究機器人超過15年的鍾書耘認為,對機器人學家來說,前沿AI技術提供了很好的工具,讓機器人可做到過往物理模型控制法無法做到的事。
簡化來說,AI機器人的「小腦」負責動作協調與執行,例如抓住水杯的手臂與手指動作,這部分可由基於力學打造的物理模型控制。而辨識水杯、理解任務目的這類任務,則可由數據驅動的AI「大腦」處理。
「現在所有的人都在討論這兩塊。」鍾書耘觀察,「能不能拋棄以往的物理模型,全部換成數據驅動的模型?還是要結合兩者?或是有辦法把傳統的物理學模型再推下去?目前還沒有一個定論。」
相當熟悉物理模型控制的鍾書耘則認為,物理模型足以處理小腦任務,若能再引入數據學習,可望在訓練量與穩定性中取得一個平衡。
在此,非夕的目標是打造出「盡可能通用的小腦平台」,讓客戶可以根據個別需求,更便利地在非夕的機器人上釋放自己研發的AI大腦能力。鍾書耘描述,「如果我能把底層控制愈做愈好, 上層AI大腦就愈來愈輕鬆,使用者就能玩出更多的變化。」
2023年底,非夕戰略孵化出另一間新創「穹徹智能」,由非夕共同創辦人王世全與盧策吾領軍,主要研發以「力」為中心的通用機器人大腦模型。目前穹徹也已完成5輪融資,最近一輪是在10月由阿里巴巴集團領投。
鍾書耘解釋,機器人本體與具身智慧大模型都屬於基礎技術,也是AI機器人中相當重要的兩大成分,「非夕集團會想要充分掌握這兩項核心技術。」

機器觸覺是實體AI落地的關鍵一環
鍾書耘直言,「力覺跟觸覺,我覺得這是physical AI或embodied AI最需要的東西。」
自駕車是研發已久的實體AI應用案例之一,但車輛與環境的互動相對單純,主要就是輪胎與地面的接觸。而新一代的機器人,尤其是人形機器人,與環境會有複雜、多元且講求即時反應的互動關係,因而力量的感測及控制技術,在這波實體AI浪潮中顯得愈發重要。
目前考量軟硬整合表現,非夕並未單獨出售力覺感測器。但鍾書耘指出,客戶可使用非夕機器人採集現實世界的力回饋數據,藉此改善模擬訓練環境,或是提升合成數據的準確度,進而加速實體AI的應用落地。
他提到,因人形機器人掀起廣大關注,「如果型態看起來不是人形的,對(投資者)來說就是old technology。但對我來說,機器人原本就應該可以是各種形態的,你要抓的其實是最最核心的那一塊。對我來說,力量控制、力量感測,才是最核心的。」